

If your AGV or robot battery distribution board needs to bring battery modules, power harnesses, or external conductors onto a PCB in a stable way while still supporting service access and vibration-sensitive use, a welding terminal is often worth evaluating before directly soldered wires. Its value is not only making an electrical connection. It is about making interface position, soldering window, and downstream assembly actions much clearer.
For projects that care about board-level high current, quick service, and compact structure at the same time, it helps to review the welding terminal page, applications page, and SMD busbar page together. That makes it easier to assign the right roles to terminals, busbars, and harnesses instead of forcing one connection type to cover the full path.
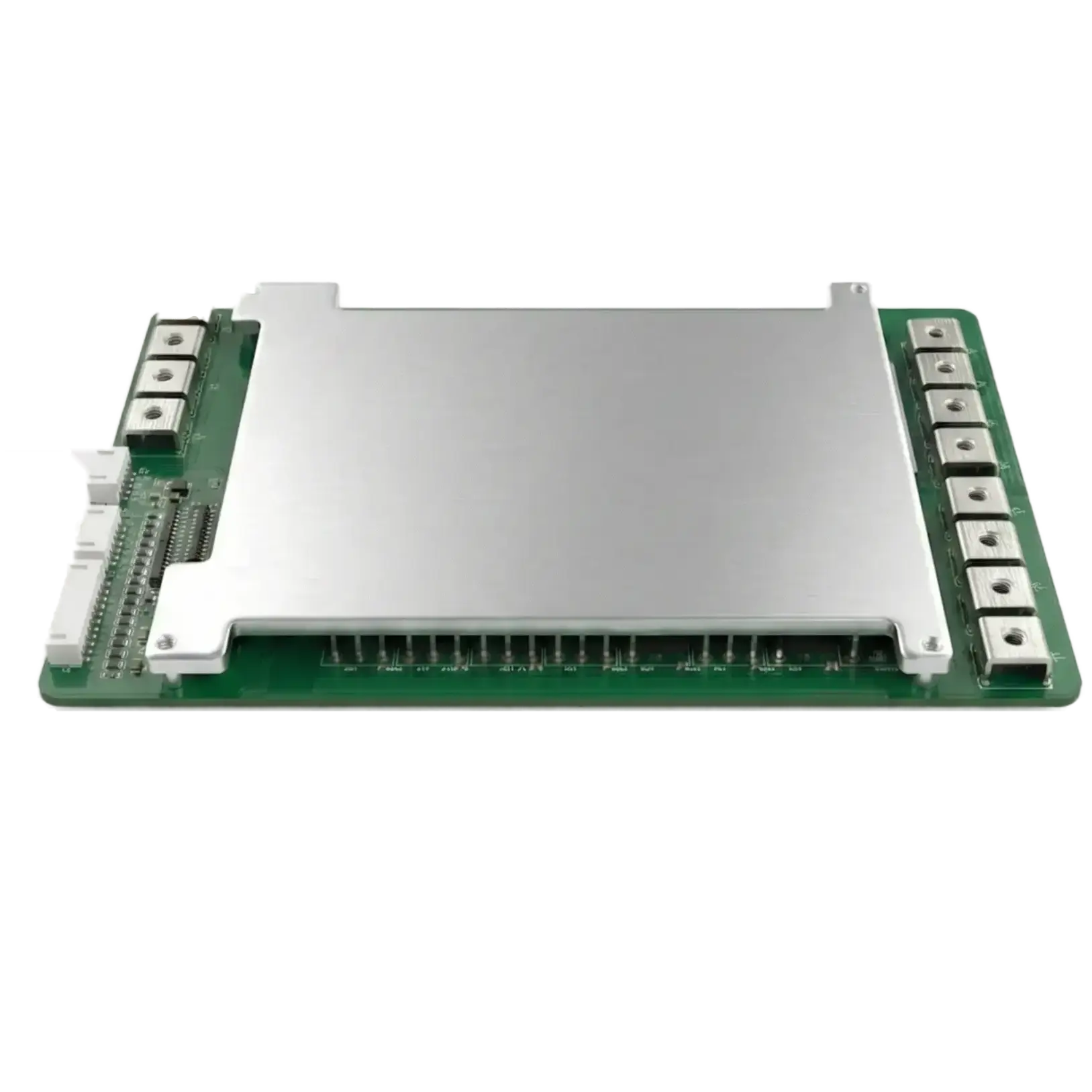
Why AGV and robot battery distribution boards often need welding terminals
Power distribution boards in robotic systems usually need to manage fixed board-mounted interfaces, more frequent service actions, tighter structures, and ongoing vibration. In those conditions, a welding terminal helps standardize the interface position and makes downstream wiring and replacement actions easier to repeat.
- Useful for bringing battery modules or harnesses onto a distribution board in a stable way.
- Useful for production projects that need a clear assembly direction and interface definition.
- Useful for power-system designs that must balance vibration exposure and service convenience.
- Useful when the team wants less manual flying wire work and fewer ad-hoc on-site adjustments.
Which positions deserve welding terminals first
| Application point | Why a terminal fits better | Main design focus |
|---|---|---|
| Battery module output point | Helps bring external conductors onto the board with a clear interface direction | Solder area, fastening method, and load path |
| Power-board input and output interface | Makes interface definition clearer and assembly or rework easier to control | Pad window, keep-out area, and service space |
| Quick-service transition position | Concentrates maintenance actions around defined interfaces instead of temporary solder points | Mating cycles, pull-force buffering, and structural support |
When a busbar or wire harness should stay in place
If a section behaves more like a fixed high-current short path or a board-level distribution node, a busbar is usually the better fit. If the route is longer, needs flexible detours, or moves more during service, a harness usually remains more practical. A welding terminal is strongest when it manages the board-level interface and external-conductor transition rather than replacing every connection form.
| Approach | Best role | Main caution |
|---|---|---|
| Welding terminal | Board-level interfaces, harness transitions, and battery-module output points | Confirm soldering window, load path, and service space early |
| SMD busbar | Fixed high-current short paths, distribution nodes, and compact conductive transitions | Layout, temperature rise, and insulation spacing need early review |
| Wire harness | Longer routes, flexible detours, and positions with more movement | The route is more flexible, but space use and assembly consistency still matter |
Five questions to answer before selecting
1. Does the terminal carry the main current path or mainly the interface transition
If the terminal mainly serves as an interface transition, structural definition, solder area, and assembly direction often matter more than simply increasing size. If it also carries the main current path, cross-section, contact area, and heat spreading should be reviewed together.
2. Is the soldering window suitable for production rhythm
Robot projects often care about both consistency and repair efficiency. If pad size, solder-flow direction, or nearby component height are not well matched, volume production can quickly see part shift, uneven wetting, or higher repair cost.
3. Will vibration and harness pull feed stress back into the solder joint
In AGV and robot applications, mechanical vibration and harness pull are very real issues. If the downstream structure does not isolate those loads, the problem often shows up in the solder joint before it shows up in the cable.
4. How frequent is the service action
If the equipment needs regular maintenance, battery replacement, or fast field repair, interface position and tool access must be reviewed early. A welding terminal is good for creating a clear board-mounted interface, but that does not mean every moving connection should end at the solder joint.
5. Does the project prioritize consistency or routing freedom
Once the project enters a production-focused stage, a welding terminal helps standardize the interface definition. If structure and routing are still changing often, the adaptability of a harness may still matter more temporarily.
A more practical decision sequence
- Separate the main current paths, board-level interface paths, and service-related moving paths on the distribution board.
- Confirm which positions need fixed interfaces and which need flexible movement.
- Evaluate soldering window, vibration load, and downstream pull force together.
- Then decide how terminals, busbars, and harnesses should split the work.
FAQ
Does an AGV battery distribution board always need welding terminals?
No. If the route is short and the structure is very simple, other connection methods may still work. But when the project values interface clarity, service convenience, and production consistency, welding terminals usually deserve earlier priority.
Can welding terminals replace busbars in robot projects?
At some interface points, yes. But it is usually better not to make terminals carry every fixed high-current short path. A more practical approach is to let busbars handle the main board-level path and welding terminals handle the interface transition.
What is easiest to miss in this type of project?
The most common miss is delaying the review of vibration, pull force, and service action. Many ideas work electrically on paper but reveal structural risk during real installation and maintenance.
Conclusion
Selecting welding terminals for an AGV or robot battery distribution board is not about choosing one part in isolation. It is about assigning board-level interfaces, fixed main paths, and moving connections to the connection types that fit them best. Once current path, soldering window, vibration load, and service style are clarified early, the production solution usually stabilizes much faster.