

如果你的 AGV 或机器人电池分配板需要把电池模组、电源线束或外部导体稳定引入 PCB,同时还要兼顾维护更换和振动环境,焊接端子通常比直接焊线更值得优先评估。它的价值不只是把线接上板,而是让接口位置、焊接窗口和后段装配动作都变得更清晰。
对于同时关注板载大电流、快拆维护和结构紧凑度的项目,建议把 焊接端子页面、应用场景页面 和 贴片汇流条页面 结合起来看。这样更容易把端子、汇流条和线束分别放到合适的位置,而不是用一种连接件去覆盖所有路径。
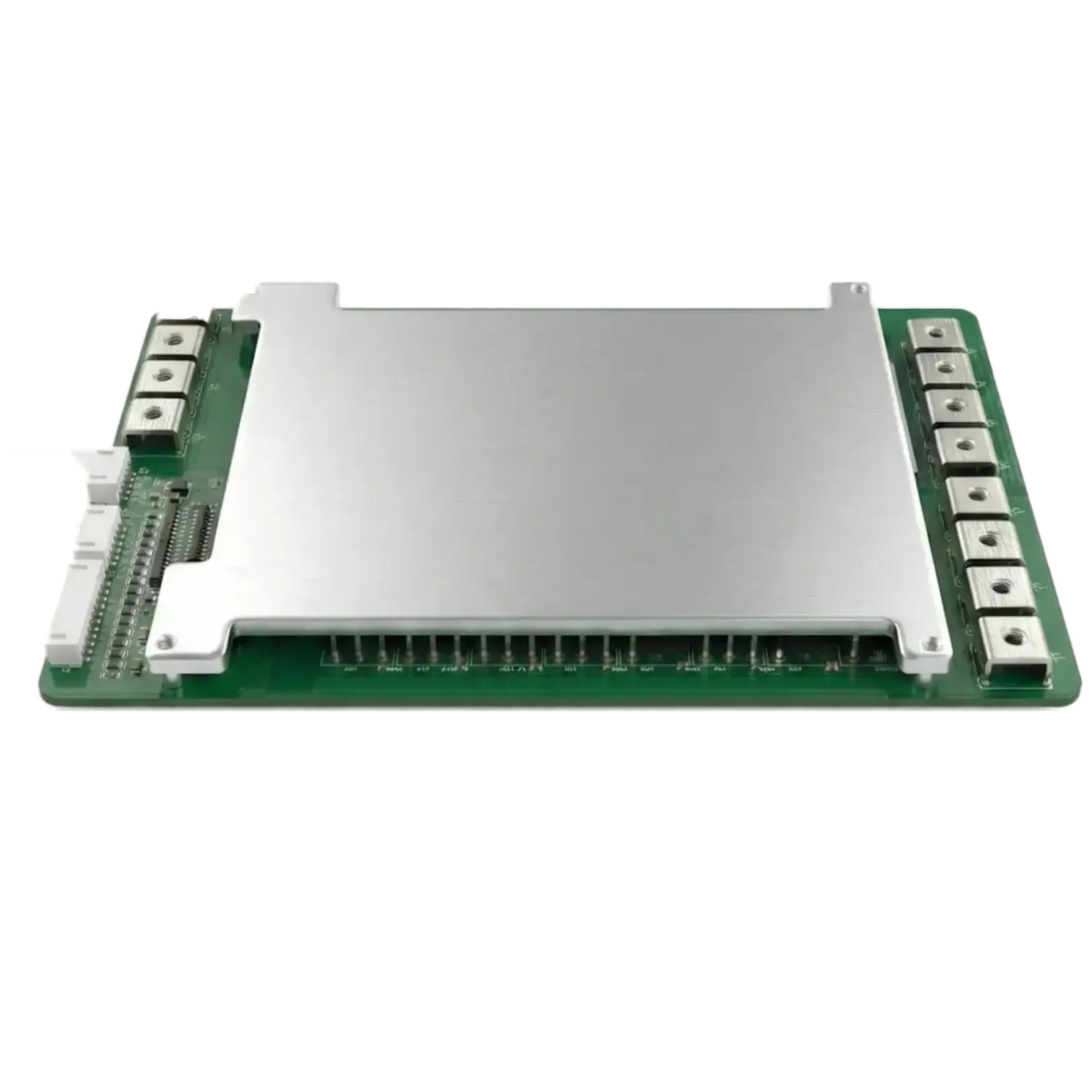
为什么 AGV 与机器人电池分配板经常需要焊接端子
机器人动力系统里的分配板,通常既要处理固定的板载接口,也要面对更频繁的维护、更紧凑的结构和持续振动。对这类位置来说,焊接端子的优势在于它能把接口位置标准化,让后段接线和更换动作更容易重复执行。
- 适合把电池模组或线束稳定过渡到分配板上。
- 适合需要明确装配方向和接口位置的量产项目。
- 适合兼顾振动环境与维护便利性的动力系统设计。
- 适合希望减少人工飞线和现场临时调整的方案。
哪些位置更值得优先看焊接端子
| 应用位置 | 更适合端子的原因 | 设计重点 |
|---|---|---|
| 电池模组引出点 | 便于把外部导体稳定引入板上并明确接口方向 | 焊接面积、锁附方式、受力路径 |
| 配电板输入输出接口 | 接口定义更清晰,装配和返修更可控 | 焊盘窗口、周边禁布区、维护空间 |
| 快拆维护过渡位置 | 便于把维护动作集中到明确接口,而不是临时焊接点 | 插拔频次、拉力缓冲、结构固定 |
什么时候更适合保留汇流条或线束
如果一段路径更像固定的大电流短通路或板上分配节点,汇流条通常更自然;如果路径更长、需要柔性绕行或维护时存在明显活动量,线束通常更合适。焊接端子更适合承担板载接口和外部导体过渡,而不是取代所有连接形式。
| 方案 | 更适合的角色 | 使用时要注意 |
|---|---|---|
| 焊接端子 | 板载接口、线束过渡、电池模组引出点 | 提前确认焊接窗口、受力路径和维护空间 |
| 贴片汇流条 | 固定的大电流短路径、分配节点、紧凑导电过渡 | 布局、温升和绝缘间距要前期一起评估 |
| 线束 | 长距离连接、柔性绕行、活动量较大的位置 | 更灵活,但空间占用和装配一致性需要评估 |
选型前先确认的 5 个问题
1. 端子承担的是主导电,还是接口过渡
如果端子主要承担接口过渡,它的结构定义、焊接面积和装配方向通常比一味放大规格更重要;如果它同时承担主电流路径,就必须把截面、接触面积和热扩散一起纳入判断。
2. 焊接窗口是否适合量产节拍
机器人项目往往既看重一致性,也看重返修效率。若焊盘面积、焊料流动方向或周边器件高度设计不合理,量产时很容易出现偏位、润湿不均或返修成本上升。
3. 振动与线束拉力会不会把应力带回焊点
AGV 与机器人场景里,机械振动和线束牵引是非常实际的问题。若后段结构没有把拉力和振动应力隔开,问题常常不会先出在线缆,而是先回到焊点。
4. 维护动作有多频繁
如果设备需要定期维护、更换电池或快速检修,接口位置和工具操作空间就必须在前期评估。焊接端子适合做清晰的板载接口,但不意味着所有活动连接都应落在焊点上。
5. 项目更关注一致性还是适配自由度
当项目已经进入批量装配阶段,焊接端子更有利于统一接口定义;如果结构和线路还在频繁修改,线束的适配自由度可能暂时更高。
一个更实用的判断顺序
- 先拆开分配板里的主电流路径、板载接口路径和活动维护路径。
- 再确认哪些位置需要固定接口,哪些位置需要柔性活动。
- 然后把焊接窗口、振动载荷和后段拉力一起评估。
- 最后再决定端子、汇流条和线束该如何分工。
FAQ
AGV 电池分配板一定要用焊接端子吗?
不一定。如果路径短且结构非常简单,其他连接方式也可能成立。但当项目更关注板载接口清晰度、维护便利性和量产一致性时,焊接端子通常更值得优先评估。
机器人项目里焊接端子能替代汇流条吗?
部分接口位置可以,但通常不建议让端子承担所有固定大电流短路径。更常见的合理做法,是让汇流条处理板上主路径,让焊接端子处理接口过渡。
这类项目最容易忽略什么?
最容易忽略的是把振动、拉力和维护动作放得太后面考虑。很多方案在电气上能成立,但一到实际装机和维护阶段就暴露出结构风险。
结语
AGV 与机器人电池分配板焊接端子的选型,核心不是单独挑一个端子,而是让板载接口、固定主路径和活动连接分别用对合适的元件。只要把电流路径、焊接窗口、振动载荷和维护方式提前拆清楚,量产方案通常会更快稳定下来。